MADROS for ProSECO: Platfrom-Platform Integration
Raum E023
Typ Demo
Studiengang / Lehrstuhl / Firma
Prof. für Softwaretechnologie
Präsentator Mikhail Belov
Projektbeteiligte Manuel Krombholz
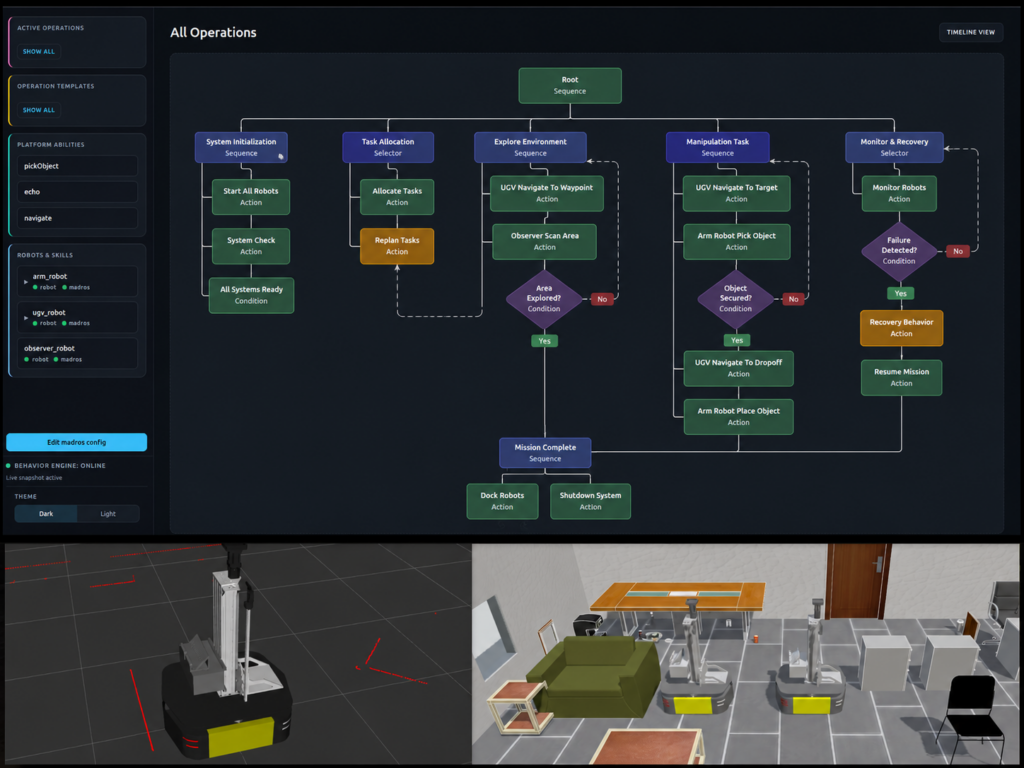
This demo presents the platform-to-platform integration of a ROS2-based multi-robot system (MRS) with the NuP platform. To enable this integration, we developed MADROS (Model-Architecture for Distributed Robotic Orchestration & Systems). In the demo, robots can be controlled both individually and as a coordinated MRS using Behavior Trees. Visitors can build and configure MRS Behavior Trees themselves and then watch their execution live in a Gazebo simulation. This makes system behavior transparent and interactive, from high-level task design down to coordinated robot actions. MADROS addresses core MRS challenges such as modularization, reusability, interoperability, and heterogeneity management. Its layered architecture (Component, Role, Registry, Adapter, Connector) and clear communication contracts for Topics, Services, and Actions support robust integration across diverse technologies, including ROS2/DDS, HTTP/WebSocket, in-process communication, and Unity-based applications. By combining decoupling patterns with lifecycle and discovery mechanisms, MADROS improves scalability, maintainability, and operational transparency. Our experience shows that scaling multi-robot systems is rarely limited by individual algorithms; it is mainly constrained by cross-platform interoperability and distributed system complexity. MADROS is designed to address exactly these constraints.